研究テーマ
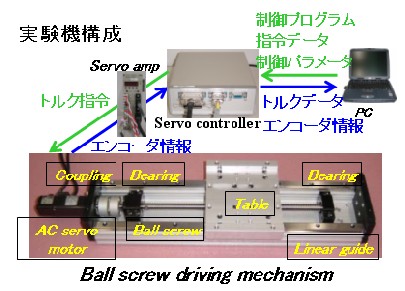
メカトロニクスシステム
メカトロニクスとしてのボールねじ駆動機構の位置決めを高速化する。
機械と制御を考慮した総合的な設計が,性能を決定する。
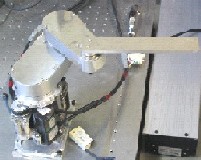
ベルト駆動ロボットの軌跡精度向上
ウェハ搬送などに用いられるベルト駆動スカラロボットでは,
ベルトの剛性の弱さから高速動作時に振動が発生する。
振動を抑制し,軌跡精度の向上を図る。
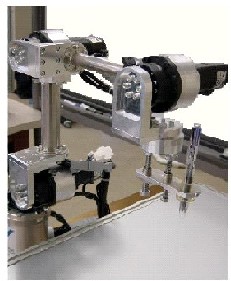
多関節ロボットの振動抑制制御
生産性の向上のためにロボットの位置決めを高速化する。
制御や指令により振動抑制し,高速化・位置決め精度の向上を図る。
二足歩行ロボットの安定化歩行
生産性の向上のためにロボットの位置決めを高速化する。
制御や指令により振動抑制し,高速化・位置決め精度の向上を図る。